21.03.2014 Полосы следящих систем в Импале
Материал из SRNS
Dneprov (обсуждение | вклад) |
Dneprov (обсуждение | вклад) |
||
| Строка 3: | Строка 3: | ||
Реализуем следящие системы в Импале. Далее речь пойдет о выборе их полосы. <br /> | Реализуем следящие системы в Импале. Далее речь пойдет о выборе их полосы. <br /> | ||
</summary> | </summary> | ||
| − | + | ||
Данная страница являет собой заметку "чтобы не забыть". | Данная страница являет собой заметку "чтобы не забыть". | ||
Версия 16:41, 22 марта 2014
Данная страница являет собой заметку "чтобы не забыть".
Необходимо выбрать полосы систем слежения, реализуемых в Импале. На данный момент полосы предполагается задавать таблично, в зависимости от текущего отношения сигнал/шум.
Система слежения за частотой
На момент написания этой заметки, в Импале реализована ССЧ второго порядка с дискриминатором типа
 .
.
При помощи модели системы в Matlab получены зависимости СКОш оценивания частоты от полосы системы для различных значений отношения сигнал/шум. В качестве входного воздействия подавался процесс ухода частоты опорного генератора, отвечающий модели вида:
 .
.
Результаты моделирования, полученные при параметрах  .
.
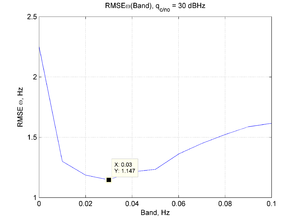
q =30 дБГц
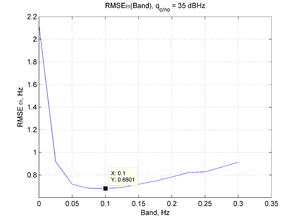
q =35 дБГц

q =40 дБГц
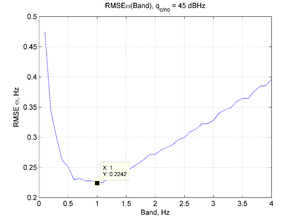
q =45 дБГц
_q_%3D30.png)
_q_%3D35.png)
_q_%3D40.png)
_q_%3D45.png)
Они же сведены в таблицу:
| q, дбГц | 30 | 35 | 40 | 45 |
|---|---|---|---|---|
| Полоса, Гц | 0.03 | 0.1 | 0.35 | 1 |
| СКОш, Гц | 1.14 | 0.68 | 0.38 | 0.22 |
[ Хронологический вид ]Комментарии
Войдите, чтобы комментировать.